Jeeseop Kim
2025

|
Design and Control of the Humanoid Robot ACHILLES: Real-Time Gait Generation for Dynamic Locomotion Adrian B. Ghansah, Jeeseop Kim, and Aaron D. Ames Ongoing [VIDEO] |
|
Safety-Critical and Distributed Nonlinear Predictive Controllers for Teams of Quadrupedal Robots Basit M. Imran, Jeeseop Kim, Taizoon A. Chunawala, Alexander Leonessa, and Kaveh Akbari Hamed Accepted to Appear (IEEE Robotics and Automation Letters) [VIDEO] [ARXIV] |

|
Hybrid Data-Driven Predictive Control for Robust and Reactive Exoskeleton Locomotion Synthesis Kejun Li, Jeeseop Kim, Maxime Brunet, Marine Petriaux, and Aaron D. Ames Accepted to Appear (IROS 2025) [VIDEO] |
|
Robust Adaptive Safe Robotic Grasping with Tactile Sensing Yitaek Kim, Jeeseop Kim, Albert Hao Li, Aaron D. Ames, and Christoffer Sloth Accepted to Appear (ECC25) [VIDEO] [ARXIV] |
|
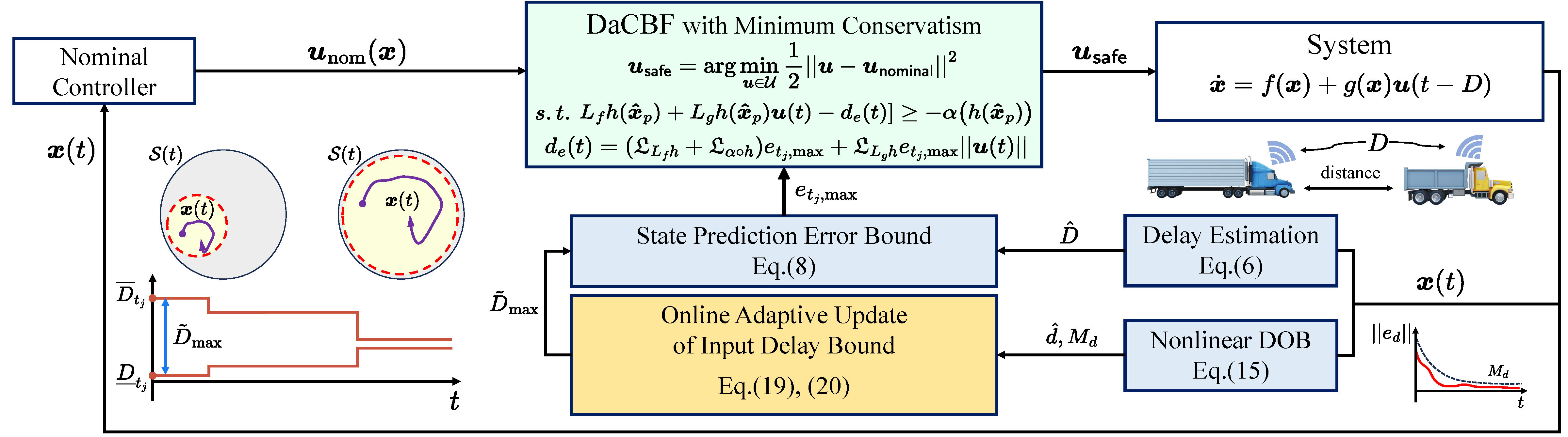
Minimizing Conservatism in Safety-Critical Control for Input-Delayed Systems via Adaptive Delay Estimation Yitaek Kim, Ersin Das, Jeeseop Kim, Aaron D. Ames, Joel Burdick, and Christoffer Sloth Accepted to Appear (ECC25) [ARXIV] |
|
Safety-critical Locomotion of Biped Robots in Infeasible Paths: Overcoming Obstacles during Navigation toward Destination Jaemin Lee, Min Dai, Jeeseop Kim, and Aaron D. Ames Accepted to Appear (ICRA 2025) [VIDEO] [ARXIV] |
|
A Distributed Layered Planning and Control Algorithm for Teams of Quadrupedal Robots: An Obstacle-Aware Nonlinear MPC Approach Basit M. Imran, Randall T. Fawcett, Jeeseop Kim, Alexander Leonessa, Kaveh Akbari Hamed Journal of Dynamic Systems, Measurement, and Control [VIDEO] [DOI] |
2024

|
Dynamic Walking on Highly Underactuated Point Foot Humanoids: Closing the Loop between HZD and HLIP Adrian B. Ghansah, Jeeseop Kim, Kejun Li, and Aaron D. Ames 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [VIDEO] [ARXIV] [DOI] |

|
Safety-critical Autonomous Inspection of Distillation Columns using Quadrupedal Robots Equipped with Roller Arms Jaemin Lee, Jeeseop Kim, and Aaron D. Ames 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [VIDEO] [ARXIV] [DOI] |
|
Data-Driven Predictive Control for Robust Exoskeleton Locomotion Kejun Li, Jeeseop Kim, Xiaobin Xiong, Kaveh Akbari Hamed, Yisong Yue, and Aaron D. Ames 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [VIDEO] [ARXIV] [DOI] |
|
A Data-driven Method for Safety-critical Control: Designing Control Barrier Functions from State Constraints Jaemin Lee, Jeeseop Kim, and Aaron D. Ames 2024 American Control Conference (ACC) [ARXIV] [DOI] |
|
Robust Safety-Critical Control for Input-Delayed System with Delay Estimation Yitaek Kim, Jeeseop Kim, Aaron D. Ames, and Christoffer Sloth 2024 European Control Conference (ECC) [DOI] |
|
Safety-Critical Coordination of Legged Robots via Layered Controllers and Forward Reachable Set based Control Barrier Functions Jeeseop Kim, Jaemin Lee, and Aaron D. Ames 2024 IEEE International Conference on Robotics and Automation (ICRA) [VIDEO] [ARXIV] [DOI] |
|
Safety-critical Control of Quadrupedal Robots with Rolling Arms for Autonomous Inspection of Complex Environments Jaemin Lee, Jeeseop Kim, Wyatt Ubellacker, Tamas G. Molnar, and Aaron D. Ames 2024 IEEE International Conference on Robotics and Automation (ICRA) [VIDEO] [ARXIV] [DOI] |
2023
|
Humanoid Robot Co-Design: Coupling Hardware Design with Gait Generation via Hybrid Zero Dynamics Adrian B. Ghansah, Jeeseop Kim, Maegan Tucker, and Aaron D. Ames 2023 62nd IEEE Conference on Decision and Control (CDC) [VIDEO] [ARXIV] [DOI] |
|
Hierarchical Relaxation of Safety-critical Controllers: Mitigating Contradictory Safety Conditions with Application to Quadruped Robots Jaemin Lee, Jeeseop Kim, and Aaron D. Ames IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [VIDEO] [ARXIV] [DOI] |

|
Safety-Critical Coordination for Cooperative Legged Locomotion via Control Barrier Functions Jeeseop Kim, Jaemin Lee, and Aaron D. Ames IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [VIDEO] [ARXIV] [DOI] |

|
Layered Control for Cooperative Locomotion of Two Quadrupedal Robots: Centralized and Distributed Approaches Jeeseop Kim, Randall T. Fawcett, Vinay R. Kamidi, Aaron D. Ames, and Kaveh Akbari Hamed IEEE Transactions on Robotics [VIDEO] [ARXIV] [DOI] |
|
Distributed Data-Driven Predictive Control for Multi-Agent Collaborative Legged Locomotion (2023 IEEE ICRA Outstanding Paper Award) Randall T. Fawcett, Leila Amanzadeh, Jeeseop Kim, Aaron D. Ames, and Kaveh Akbari Hamed IEEE International Conference on Robotics and Automation (ICRA) [VIDEO] [ARXIV] [DOI] |
2022
|
Thesis |
Collaborative Locomotion of Quadrupedal Robots: From Centralized Predictive Control to Distributed Control Jeeseop Kim Virginia Tech [LINK] |
|
Distributed quadratic programming-based nonlinear controllers for periodic gaits on legged robots Vinay R. Kamidi, Jeeseop Kim, Randall T. Fawcett, Aaron Ames, and Kaveh Akbari Hamed IEEE Control Systems Letters [VIDEO] [DOI] |
|
Cooperative locomotion via supervisory predictive control and distributed nonlinear controllers Jeeseop Kim, and Kaveh Akbari Hamed Journal of Dynamic Systems, Measurement, and Control [VIDEO] [DOI] |
2021
|
Real-time planning and nonlinear control for quadrupedal locomotion with articulated tails (ASME Dynamic Systems & Control Division Rudolf Kalman Best Paper Award) Randall T. Fawcett, Abhishek Pandala, Jeeseop Kim, and Kaveh Akbari Hamed Journal of Dynamic Systems, Measurement, and Control [VIDEO] [DOI] |
2020
|
Quadrupedal locomotion via event-based predictive control and QP-based virtual constraints Kaveh Akbari Hamed, Jeeseop Kim, and Abhishek Pandala IEEE Robotics and Automation Letters [VIDEO] [ARXIV] [DOI] |
2017
|
Thesis |
Improvement of Humanoid Gait Control using Actuator Deformation Model Jeeseop Kim Seoul National University [LINK] |
|
Application of robot manipulator for cardiopulmonary resuscitation Jaesug Jung, Jeeseop Kim, Sanghyun Kim, Woon Yong Kwon, Sang Hoon Na, Kyung Su Kim, Gil Joon Suh, Byeong Wook Yoo, Jin Woo Choi, Jung Chan Lee and others 2016 International Symposium on Experimental Robotics [VIDEO] [DOI] |
2016
|
Improvement of humanoid walking control by compensating actuator elasticity Jeeseop Kim, Mingon Kim, and Jaeheung Park IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids) [VIDEO] [DOI] |
Theses
- J. Kim., “Collaborative Locomotion of Quadrupedal Robots: From Centralized Predictive Control to Distributed Control”, Doctoral Dessertation, Dept. of Mechanical Engineering, Virginia Tech, Virginia, August 2022.
[LINK][PDF] - J. Kim., “Improvement of Humanoid Gait Control using Actuator Deformation Model”, Master Thesis, Dept. of Transdisciplinary Studies, Seoul National University, Seoul, South Korea, February 2017.
[PDF]